
NOTES
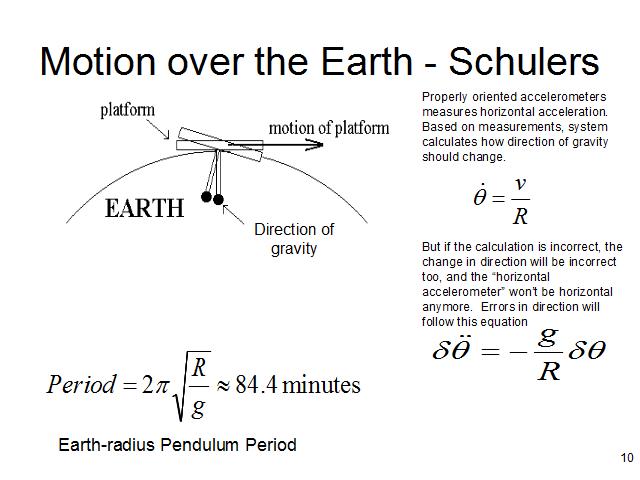
This chart shows a correctly aligned platform (one that "knows" the correct direction of the buoyant force). As the platform moves across the surface of the earth, the system must calculate the new direction of gravity. The correct adjustment is that the rate of change of the direction of the buoyant force is velocity over the radius of the earth.
Now suppose that the alignment of the platform is incorrect by a small angle delta theta. The calculation of horizontal acceleration will be incorrect by –g*sin(delta theta), because its calculation of horizontal will be incorrect, leading to a miscalculation of horizontal velocity (even if the ship is not actually moving). Due to this error, the required adjustment to theta will be incorrect - leading to this equation for the change in the theta error. This equation describes an oscillator with a period of 84.4 minutes - the Schuler Period (not-coincidentally, the period of a satellite going around the Earth at ground-level.
Notice that because the curvature of the Earth is not constant and the surface gravity of the Earth is not constant either, neither the g nor the R used in these equations are constant either – the local Schuler frequency will change from place to place, but only slightly.
One way of thinking about what's going on is by thinking of the platform as using a pendulum to find the direction of gravity. As the ship moves across the earth, the pendulum lags behind, resulting in a tilt in the platform. But if you make the pendulum longer, the amount of lagging decreases. An "earth-radius" pendulum would not lag at all, resulting in perfect updating of the direction of gravity as the ship moved - and by "tuning" thee system to oscillate at that period, the system acts like an Earth-radius pendulum; as the ship moves across the Earth, the system keeps up with the changing direction of gravity, at least to the first order. Instead of an error caused by "lagging" every time the ship moved, what remains is just an oscillating error at a known frequency, that can be damped out by a suitable reference.
These errors are named after Maximilian Schuler, a German scientist who helped develop inertial navigation systems and was the first person to realize the advantages of tuning a system to oscillate at 84.4 minutes at the surface of the Earth.